The robot is barely visible from afar, a vibrating object that looks more like a small insect than anything else. Seen up close, however, the illusion gives way to a tangle of small wires, batteries and propellers.
This incredible invention is “Piccolissimo,” the world’s smallest self-powered controllable robot, its creator claims. The eponymous robot is the result of research done by Penn’s own ModLab, a team led by Matthew Piccoli, a Ph.D. student in the School of Engineering and Applied Science.
“I initially got into flying things because I watched Top Gun too many times as a kid,” joked Piccoli, a licensed pilot. “While working as a grad school student at Mark Yim’s lab, he gave me the freedom with what I wanted to do, and of course my brain went to flying things.”
The team actually created two robots, a larger one nicknamed “Maneuverable Picollisimo,” and a smaller one called “Mini Piccolissimo.”
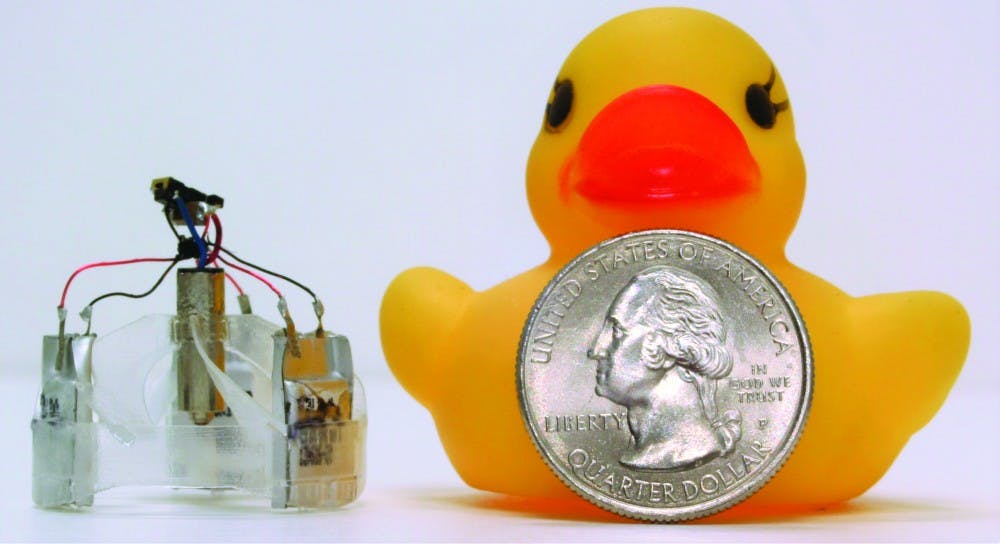
The smaller one, which is considered the world’s smallest self-powered controllable robot, has a perimeter of 28 millimeters, while the other one has a perimeter of 39 millimeters.
Both robots maintain similar designs and constructions: a 3-D printed circular body with one central motor connected to six small propellers, a set of batteries and a MOSFET receiver that receives signals sent via infrared light. The robots are controlled via infrared light, and the intensity of the light can be changed to adjust the intensity of the robots’ propellers.
The road to Piccolissimo’s development began with Piccoli’s research as a graduate student.
“Initially, we started off trying to make the world’s simplest flying thing,” Piccoli said. “Afterwards, we thought about what the next step would be, and we decided to try and create the world’s smallest flying thing”.
The robot has a wide range of possible applications.
“In the long run, we can fly it as a swarm all at once, use it to fly through small spaces, look for things and attach sensors and cameras to the robot. There are many, many other applications,” said Kim Luong, a first-yearengineering master’s student and member of the Modlab.
“Research is a funny thing” Piccoli said. “In engineering, there are two ways of going about something. Either I have a problem, and I’m going to try and fix it, or I have a solution, now I’m going to find a problem. In this case, we have a solution that luckily worked, and now we can try to find a problem.






